





Controlador óptimo no invasivo para sistemas inestables basado en aprendizaje en línea
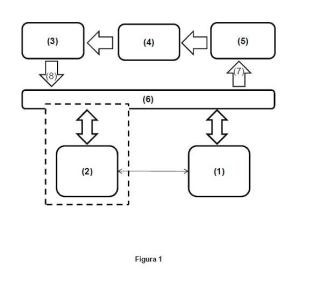
Controlador no invasivo (2) de un sistema físico real (4), que comprende: a) un módulo de registro de transiciones, donde se almacenan los nuevos estados del sistema físico real (4); b) un módulo con un modelo de comportamiento del sistema (4) que debe ser controlado; c) un módulo de exploración de estados que identifica transiciones no contenidas en el modelo de comportamiento del sistema (4); d) un módulo de control por mapeado, y e) un módulo de política de control, basado en las transiciones identificadas en el módulo de exploración de estados. Unos sensores (3) detectan el estado (8) del sistema físico real (4), de manera que el estado (8) se transmite a un bus (6) mediante un primer vector (S). El bus (6) descarga los datos relativos al estado (8) mediante un segundo vector (X), pasando los datos del segundo vector (X) al controlador.
