





Sistema de visión artificial para el control de crucero adaptativo en automóviles
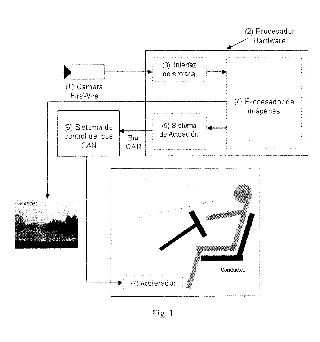
El sistema objeto de invención tiene la finalidad de realizar el control de la velocidad de un automóvil de forma automática dependiendo de la distancia o el tiempo existente con respecto al vehículo precedente en el mismo carril. Este tipo de sistemas suele recibir el nombre de control de crucero adaptativo. La medida de la distancia y la velocidad relativa con respecto al vehículo precedente se realiza utilizando una sencilla cámara instalada en el interior del propio automóvil. La imagen recibida por la cámara es procesada por un sistema hardware a bordo del vehículo. Como resultado del procesamiento realizado se obtiene la distancia, en metros, y la velocidad relativa, en m/s, existente entre el vehículo propio y el vehiculo precedente en el mismo carril de la carretera o autopista. El procesador a bordo del vehículo modificará la velocidad del automóvil de forma que se respete un tiempo de seguridad preestablecido.
